
발 없는 우주 휴머노이드 '헬리오스' 개발
게시2026년 5월 31일 08:00
newming AI
AI가 1개의 뉴스를 요약했어요.
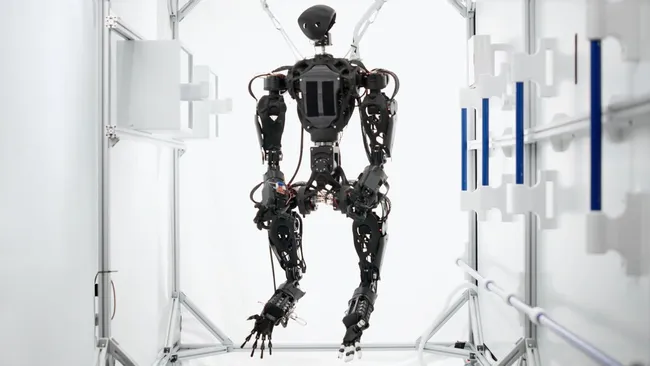
스위스 취리히연방공대 연구진 주축의 오비트 로보틱스가 손 4개를 가진 휴머노이드 '헬리오스'를 개발했다. 헬리오스는 발 대신 손으로 우주선 내부 파이프를 붙잡아 무중력 환경에서 이동하고 작업하도록 설계됐다.
헬리오스는 국제우주정거장(ISS)의 유지·보수 임무를 담당해 우주비행사들이 과학 연구에 집중하도록 할 계획이다. 현재 우주비행사들은 ISS 임무 시간의 35%를 시설물 유지·보수에 사용하고 있으며, 시간당 인건비는 14만달러에 이른다.
오비트 로보틱스는 어깨에만 모터를 장착하고 케이블로 팔과 손가락을 제어해 무게를 줄였다. 헬리오스가 상용화되면 인간 우주비행사와 휴머노이드가 협력하는 새로운 우주 개척 모델이 될 것으로 예상된다.
- [영상]발 없이 손만 4개…이상한 휴머노이드, 우주로 올라가는 이유는?